PCBA生产例简介
我司专业从事工业生产设备控制设备电子开发、汽车MCU电子控制系统方案设计、伺服控制板PCBA加工、数控机床主板PCBA加工,智能家居电子研发、3D打印机控制板PCBA加工等领域。业务流
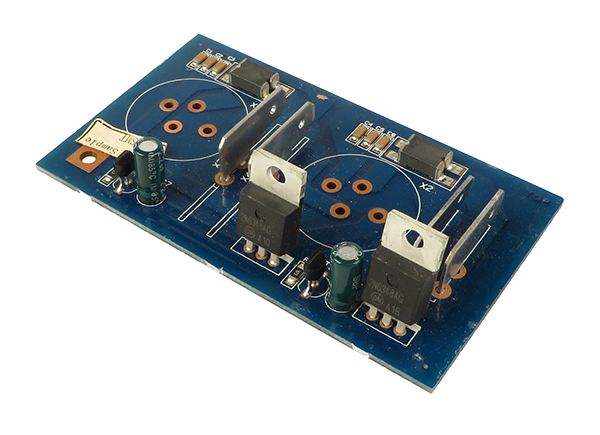
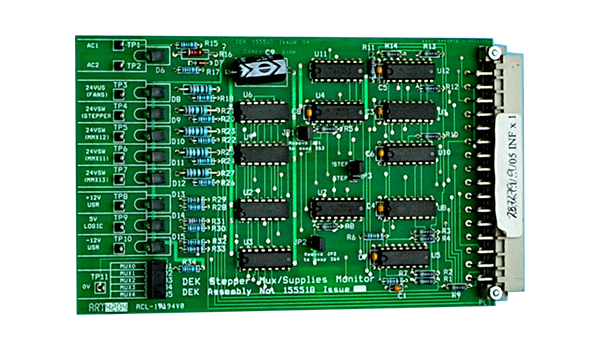
PCBA生产案例图片

PCBA生产案例详情
我司专业从事工业生产设备控制设备电子开发、汽车MCU电子控制系统方案设计、伺服控制板PCBA加工、数控机床主板PCBA加工,智能家居电子研发、3D打印机控制板PCBA加工等领域。业务流程包括电子方案开发设计、PCB生产、元器件采购、SMT贴片加工、样机制作调试、PCBA中小批量加工生产、后期质保维护一站式PCBA加工服务。
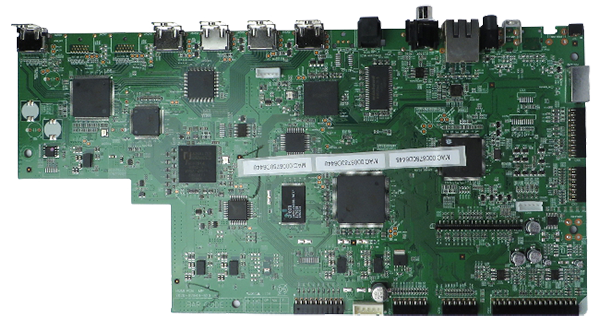
机器人障碍检测系统控制板关系着运动的智能化程度,本案例中的机器人障碍检测控制方案基于ARM处理器、视觉传感器设计。
系统总体方案设计
根据系统的功能需求,设计了以嵌入式系统为核心,以ARM处理器为主控制器,以视觉传感器检测障碍的机器人障碍检测系统方案。机器人障碍检测系统总体方案框图的整体框如图
机器人障碍检测系统整体结构由ARM嵌入式系统、视觉模块、电源模块、存储模块、调试模块组成。ARM嵌入式系统作为系统的核心部分,主要负责协调系统各模块的运行;清洁运行中需要时刻感知环境信息,通过视觉模块进行视频图像采集,将采集的图像存放在存储模块,经过嵌入式系统处理,实现清洁的障碍检测。电源模块提供系统各模块的电源需求。调试模块通过调试工具实现系统的开发调试。RS232接口作为PC机与嵌入式系统串口通讯接口。视觉障碍检测方案设计。由于全景下的障碍检测算法复杂度高、难度大、硬件设备要求高、开发周期长等因素,本文基于局部区域的视觉传感器障碍检测。在局部区域内,一般障碍物与地面有非常明显的交界线,因此本文通过检测障碍物与地面交界线的这一显著特征进行障碍检测。
视觉障碍检测整体方案
视觉模块主要任务是通过单目视觉进行障碍检测,视觉障碍检测的整体结构示意图如图。
视觉模块子系统主要包括图像采集模块、障碍检测模块及障碍定位模块。
1. 图像采集模块。通过视觉传感器采集环境信息,是清洁障碍检测的前提工作。
2. 障碍检测模块。实现检测障碍功能,通过图像处理及理解等方法,检测环境中是否存在障碍物。
3. 障碍定位模块。实现障碍物的测距功能,通过摄像机成像模型方法,完成对障碍物的测距定位。
障碍检测及定位模块实现方案
在局部区域内,一般障碍物与地面具有明显的交界线,因此,可以通过检测交界线进行障碍检测障碍检测基本流程图如图。
首先对原始图像进行图像预处理,其次通过边缘检测方法提取障碍与地面的交界线特征,然后判断是否存在障碍物,如果存在障碍物,最后通过Hough变换标示出障碍物区域。
障碍定位模块实现方案
障碍定位模块的功能是实现障碍物的位置测量,本文根据摄像机透视成像模型的方法进行测距,该模型将图像坐标转换成世界坐标,实现障碍物的定位功能。
透视模型是最常用的摄像机投影模型,可以用小孔成像模型简化如图。
ABCD为摄像机拍摄到的地面上梯形区域,O点为摄像机镜头中心点,G点为摄像机光轴和地面的交点,O点为O点在地平面上的垂直投影。a、b、C、d、g分别为A、B、C、D、G在图像平面的对应点。
软硬件整体设计
硬件总体设计
根据系统的总体方案,为实现嵌入式系统的功能,提出了满足系统需求的硬件总体设计方案,其整体框图如图。
根据系统功能需求及模块化结构设计的思想,机器人障碍检测控制系统硬件模块设计是:
1. 嵌入式最小系统模块,包括晶振电路、时钟电路、Flash、SDRAM电路等。
2. USB接口模块,该模块主要是通过USB外接USB摄像头进行图像采集与图片传输。
3. RS232接口模块,该模块实现宿主机与目标机的串口通讯,进行嵌入式系统开发。
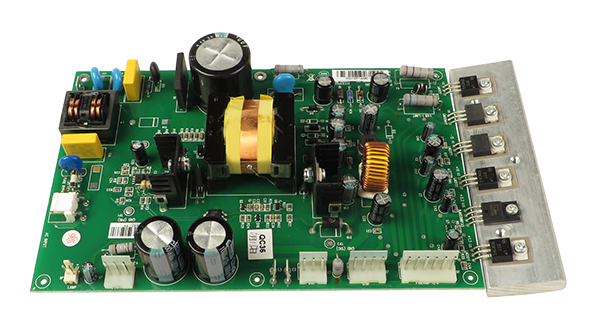
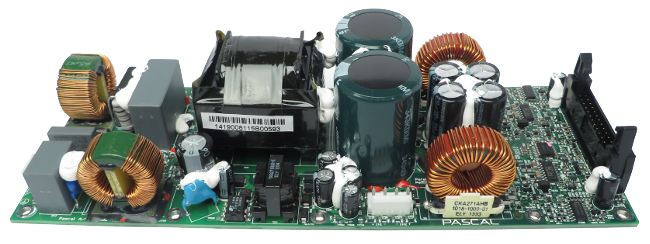
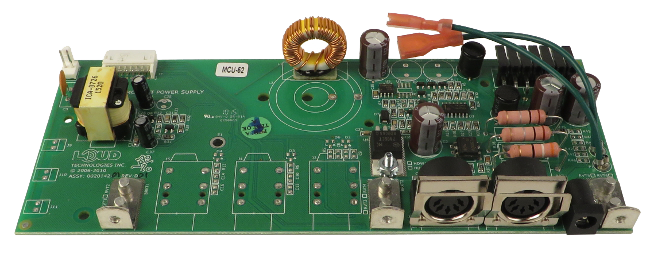
4. 电源模块,该模块为系统各芯片及元器件提供所需电源。
软件总体设计
系统采用Linux嵌入式操作系统作为S3C244O软件开发平台,软件设计主要包括图像采集程序、图像处理及障碍定位程序设计,主程序的流程如图。
1)图像采集程序设计。基于Video4Linux2API。Linux系统中的视频子系统Video4Linux为视频应用程序提供了一套统一的API,视频应用程序通过标准的系统调用即可操作各种不同的视频捕获设备。
2)图像处理程序设计。根据系统的障碍检测算法,设计出能够实现障碍检测的软件程序。
3)障碍定位程序设计。根据系统的障碍定位方案,提取出图像坐标,进而转换成世界坐标系实现障碍物的定位功能。更多请咨询:www.pcbsheji.com